Dear Experts.
I'm not sure if this topic is appropriate for this thread, but I post it.
I'm controlling 8 of servo motors by directly from GPIO driven by pigpio.
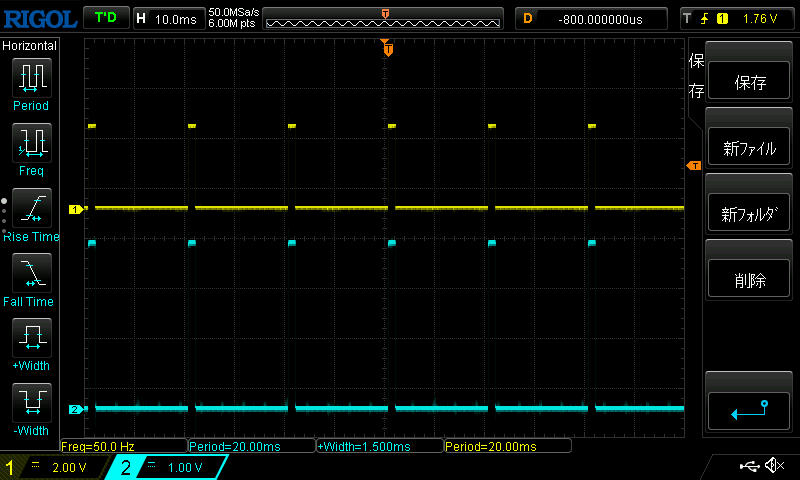
On RPi4, the PWM pulse is what I'm expecting like below.
![Image]()
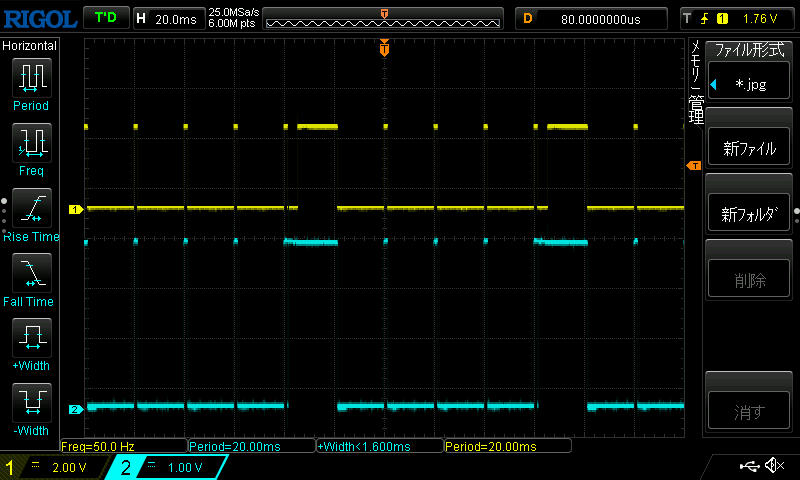
And when move to Pi Zero 2W, I see irregular pulse periodically like below.
![Image]()
Is there any differences from the programming point of the view?
The code is below.Thank you very much for your kind help in advance.
sohonomura2020
I'm not sure if this topic is appropriate for this thread, but I post it.
I'm controlling 8 of servo motors by directly from GPIO driven by pigpio.
On RPi4, the PWM pulse is what I'm expecting like below.
And when move to Pi Zero 2W, I see irregular pulse periodically like below.
Is there any differences from the programming point of the view?
The code is below.
Code:
#!/usr/bin/python3###import webiopiimport pigpioimport timeimport syspi = pigpio.pi()FL_A = 16 # (SE-SERVO-HAT01-0) GPIO16FL_B = 17 # (SE-SERVO-HAT01-1) GPIO17FR_A = 22 # (SE-SERVO-HAT01-2) GPIO22FR_B = 23 # (SE-SERVO-HAT01-3) GPIO23RL_A = 24 # (SE-SERVO-HAT01-4) GPIO24RL_B = 25 # (SE-SERVO-HAT01-5) GPIO25RR_A = 26 # (SE-SERVO-HAT01-6) GPIO26RR_B = 27 # (SE-SERVO-HAT01-7) GPIO27#--------------------------------------------------------------------##--------------------------------------------------------------------def servo_ctrl(servo_no, degree): val = 500 + ((2000 * degree) / 180) print(servo_no, degree, val) pi.set_servo_pulsewidth(servo_no, val) time.sleep(0.01)#--------------------------------------------------------------------##--------------------------------------------------------------------def main(degree): print(degree) servo_ctrl(FL_A, degree) servo_ctrl(FL_B, degree) servo_ctrl(FR_A, degree) servo_ctrl(FR_B, degree) servo_ctrl(RL_A, degree) servo_ctrl(RL_B, degree) servo_ctrl(RR_A, degree) servo_ctrl(RR_B, degree)#--------------------------------------------------------------------##--------------------------------------------------------------------if __name__ == '__main__': av = sys.argv ac = len(av) if (ac == 1): main(90) else: main(int(av[1]))sohonomura2020
Statistics: Posted by sohonomura2020 — Wed Mar 27, 2024 12:42 am